My MSEE thesis is now complete and I’ve satisfied all of my requirements for graduation from the electrical engineering department. My thesis is entitled “Design of a Reliable Embedded Radio Transceiver Module with Applications to Autonomous Underwater Vehicle Systems“. Well, I guess this concludes my edumahkayshun, and now I gots ta git me a reel job.
University of Washington Robofish on You Tube
My lab’s robotic fish are now on You Tube:
This video demonstrates robot fish schooling
Underwater camera view of our fish
The comments on YouTube about this video resmble the same questions and comments we received at our open house demo – especially the one about laser beams. LOL. Two comments were notable though:
ThunderStormV5000 writes:
Robot Fish for president! They have more brains than the current candidates!
Well, at least in the case of His Holiness the Liberal Savior (Barack Obama), I agree. A PowerPC processor clocked at 40 MHz would do a much better job of running our country.
zharbulfin writes:
thats really kewl. the people who made those r geniuses ^^
Yep, I agree with that one too! :D
Lots of Media Interest
I found out what happened. Our research was originally detailed in an article at UWeek (the University of Washington’s News Site). This article was started all of the media activity and was quoted at Ocean Lines, EurekAlert!, and Slashdot.
This was followed by a news cast at King 5 (Local News for Seattle).
Our work was also featured at ZDNet and Science Daily. Very cool. Today I learned that the Mumbai Mirror also wrote an article. In the Mumbai article, we’re referred to as “boffins” – apparently British slang for “scientists”.
All of this activity isn’t surprising – robots are cool. Robotic fish are even cooler. We’ll be doing some more demos for reporters wanting to show video of coordinated maneuvering of the robotic fish. When this is posted, I’ll let you know
Robot Fish on King 5 News
My lab’s work was featured on our local Seattle News station. I designed the radio transceivers that the robotic fish use (you can see a green wire antenna sticking out of them while they swim). Ben designed the actual fish and its unique swimming mechanism (fin actuation). He’s got a sweet CAD model that I’m using in my thesis. Dan built the camera tracking system featured in the broadcast. We used that tracking system to enable autonomous swimming for our open house demonstration that I described a few posts ago.
Video here: King 5 Video on Demand
Robotic Fish at the UW Engineering Open House
 My lab hosted another successful engineering open house exhibit today at the University of Washington. I’ve been working in the Nonlinear Dynamics and Control Lab at UW for two years now and I’m close to completing my masters degree. My thesis is based on a radio transceiver that I specifically designed to enable underwater communication between our three robotic fish. Today, my transceiver was used to demo our work to the UW community and visitors to the university. [Read more…]
My lab hosted another successful engineering open house exhibit today at the University of Washington. I’ve been working in the Nonlinear Dynamics and Control Lab at UW for two years now and I’m close to completing my masters degree. My thesis is based on a radio transceiver that I specifically designed to enable underwater communication between our three robotic fish. Today, my transceiver was used to demo our work to the UW community and visitors to the university. [Read more…]
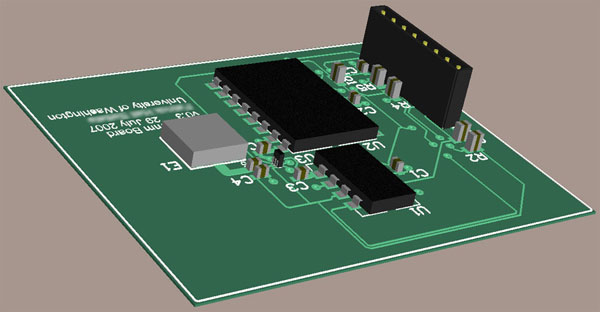
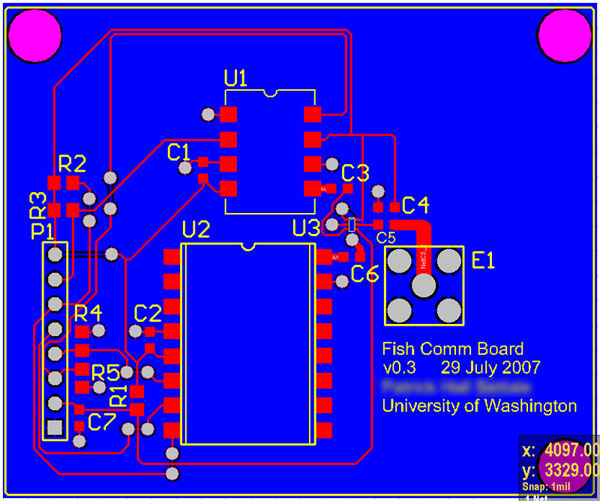
Talking Fish
I finally finished a project that has been nagging me for the past few weeks! Yah :) We have these robotic fish swimming around and they can’t talk to each other, well, until now. I designed a transceiver communication board using RF modules from Linx Technologies hoping that time would be saved. Designing a stable radio frequency (RF) circuit is fairly straightforward when you’ve got fully integrated embedded modules, but once that design is placed in a conductive medium (like water) it gets a whole lot more complicated. As if RF design wasn’t black magic already, antenna placement, receiver sensitivity and ground plane geometry become critical and will make or break a design. At least the first board revision is done and I can send it off for fabrication and component soldering (2-3 week turnaround time). Now I can get married without this thing hanging over my head. ::breathing a big sigh of relief::
Of course this means I get to look forward to hardware hacking and bug fixing once I return from the honeymoon.